
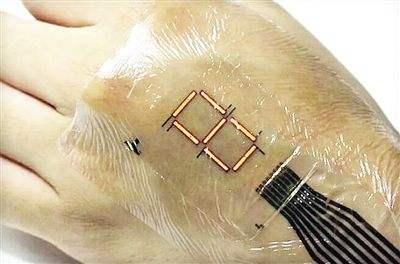
与传统的大宗电子设备不同,“柔性电子”是指可以像纸张或手机膜一样轻薄柔软,像橡胶一样有弹性的电子设备。
在“柔性电子”的应用中,“电子皮肤”是不可忽视的。所谓“电子皮肤”,就是借助柔性电子技术制造出类似人体皮肤的电子设备。电子设备需要像人的皮肤一样柔软,同时需要有和皮肤一样的触觉。甚至,它还有比皮肤更强的一些方面,例如,帮助人类从环境和人体中获取物理和化学信号,提高与环境或自身互动的能力。
皮肤作为人体最大的器官,是触觉的载体,为我们提供环境中的物理信息。我们能感觉到一个物体的硬度,是因为我们的皮肤里散布着许多压力感受器。这些感受器可以根据皮肤与物体接触时感受到的力来区分物体的硬度。因此,通过压力传感器,电子皮肤也可以感知物体的硬度。实现压力传感的效果有很多种方式,其中最简单也是最常用的一种就是压阻式压力传感器,利用导电材料变形产生的电阻变化来实现传感。
借助柔性压力传感器,还可以实现对物体形状的感知。我们的皮肤上遍布着压力感受器,但只有那些与物体接触的感受器会向我们的大脑发送信号。麻省理工学院的研究人员设计了一种低成本的可伸缩触觉手套,手套上分布着548个压阻式压力传感器,每个传感器感应到的压力值都可以被详细记录下来。他们用这种手套抓东西,如杯子、勺子、钢笔、石头等。,记录了手套抓取的数据,并录制了视频。然后用这些数据训练深度学习网络,从而识别不同的对象。
通过柔性电子技术来构建对硬度、压力、形状和材料的感知,然后集成柔性拉伸传感器、温度传感器等。,我们基本上可以构造出具有触觉的电子皮肤。
电子皮肤最直接的应用就是智能机器人。有了触觉,机器人可以更全面、更准确地读取环境中的压力信号,这样它的动作就会更加准确、多样、有效。比如现在的机器人缺乏对物体的精确力反馈,无法精确抓取和操纵小而软的物体。电子皮肤可以提供精细的机械反馈,帮助未来的机器人完成精确的抓取和操纵任务。
然而,虽然我们可以在传感器层面实现对物体的感知,但要有效地将传感器信号转化为大脑可以理解的神经电信号,仍然非常困难。但是通过仿生学,我们还是可以希望解决这个问题。
皮肤中的多种触觉感受器通过多层中间神经元将捕捉到的触觉信息传递到脊柱,神经纤维中的多种传入神经和突触编码并分离感受器的传入信号。最后,脊椎将编码和分离的信号传输到大脑。为了解决这个问题,科学家发明了人工传入神经。这种人工传入神经有三个核心部件:压阻式压力传感器、有机环形振荡器和突触晶体管。压力传感器负责获取压力信息。环形振荡器不是神经纤维,而是将压力信号转换成与感觉神经元动作电位频率相匹配的电压脉冲。突触晶体管将这些脉冲信号整合转化为突触后电流,并与生物体内的传出神经连接,形成完整的单个突触反射弧。
然后,他们将人工传入神经与蟑螂腿上的传出神经连接起来,在压力传感器上施加一定的压力。压力信号转化为突触后电流,经放大后传递到蟑螂腿上的传出神经,成功驱动蟑螂腿的运动。
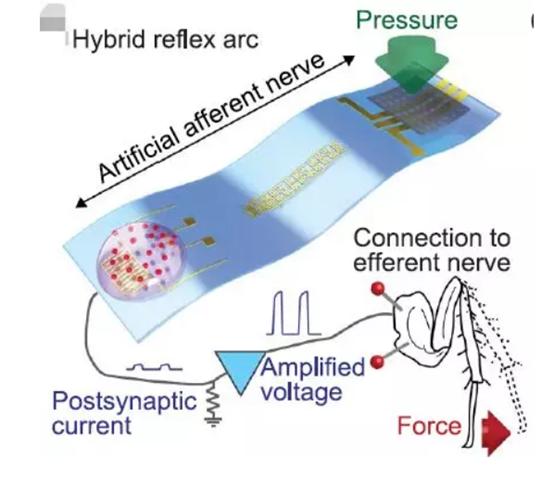
人工神经控制蟑螂腿的机理(来源:科学)
如果采用脑机接口技术,用编码信号刺激大脑的特定区域和细胞,就可以实现触觉体验。然而,由于对感知的神经编码了解有限,脑机接口技术的发展需要进一步突破,我们要攻克这一技术难题还有很长的路要走。

除了建立触觉系统,我们还可以利用柔性电子技术使各种传感器具有皮肤的一般属性,如柔软性、可拉伸性、自愈性等。,然后将它们覆盖在皮肤或衣服上,随时随地感知环境和自身信息。除此之外,人们还可以利用其他物理化学原理,让电子皮肤拥有更多功能。例如,对于外部环境,电子皮肤可以用来感知紫外线强度、湿度、磁场、物体的接近度等。在阳光下;对于人体本身,电子皮肤可以无创监测体液中的血糖等生理指标,采集脑电、肌电、心电信息。







