PID控制简介(简介):
PID控制器是以系统误差为基础,利用比例、积分和微分来计算控制量进行控制。
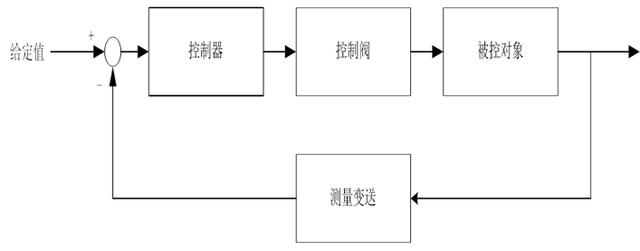
组合机的恒温控制系统——表面冷却阀开度的控制;
1.控制驱动单元-表面冷却阀-作为输入信号;
2.被控对象——出口温度——被用作输出反馈。
误差值被发送到PID控制器,作为PID控制器的输入。PID控制器的输出为:误差乘以比例系数Kp+Ki*误差积分+Kd*误差微分。
上面的公式是三项之和,是PID运算的结果。经PLC转换后,发送到表面冷却阀驱动器,PID将调整表面冷却阀,直到误差等于0。
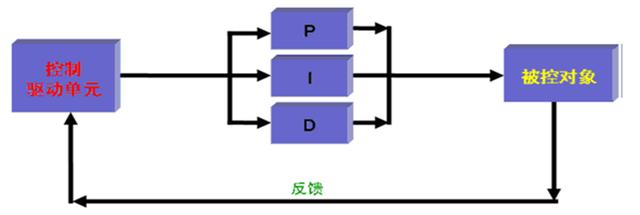
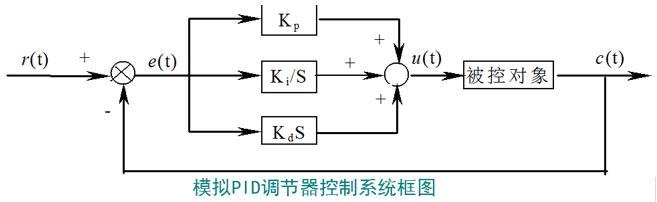
PID控制原理:
PID控制及作用:PID调节器是线性调节器,将设定值r(t)与输出值c(t)进行比较,形成控制偏差:E (t) = R (t)-C (t)
经过比例、积分、微分运算后,由线性组合形成控制量。如图,简称P(比例)、I(积分)、D(微分)调节器。
PI控制器的选择:适用于控制通道有一定延迟,负载变化小,被控量无静差的控制系统;
PID控制器的选择:适用于负荷变化大、容量滞后大、控制品质要求高的控制系统,如恒温恒湿控制系统。
PID控制in 空机电标准应用实例:
终端恒湿控制系统流程图:
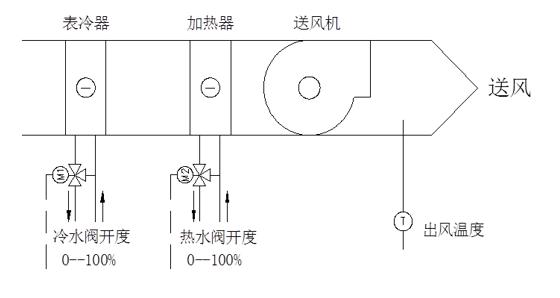

以西门子PLC为例。
假设目标出风温度为15℃,实际出风温度为13℃,误差应为2。将目标值、实际值、P值、I值、D值输入到PLC PID运算指令中,得到PID自动运算后的运算结果,并将结果转换成0-10V的电压信号输入到表面冷却阀或加热阀执行机构。
PLC运算结果为0.0-1.0之间的实数,0-0.5对应100%-0%的表冷器阀门开度;0.5-1.0对应于加热阀开度的0%- 100%。
假设只设置P值,I值和D值都设置为0,如果误差不变,PID运算的结果也是不变的,那么表冷器阀门的开度也是不变的,可能过大也可能过小。
如果表冷器阀门开度过大,出口温度会不断下降,PID运算后输出值减小,从而减小表冷器阀门开度;
如果表冷器阀门开度过小,出口温度会不断上升,PID运算后输出值会增大,从而增大表冷器阀门的开度;
P值控制的温度曲线图(无I值和D值控制):
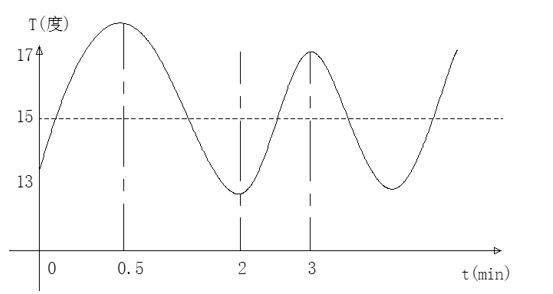
P越小,过渡过程越平滑,但静态误差越大。随着P的增大,静态误差会减小,但不能完全消除静态误差,只能起到粗调的作用。但如果P过大,则跃迁过程容易振荡,如果P过大,则可能出现发散振荡。
通过上述比例调节,出口空气温度可以在一定范围内正弦波动,但不能恒定。原因是温度响应滞后,造成超调,需要加入积分项调节。
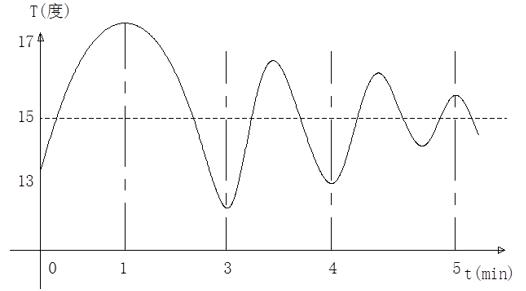
在比例调整的基础上,增加了积分调整,即设置P值和I值,D值仍然设置为0。即使误差不变,PID运算结果也是不断变化的,其输出值会自动指示冷却阀的开度。
PI值控制温度曲线(无D值控制):
PI控制温度曲线(无D值控制),扰动源:
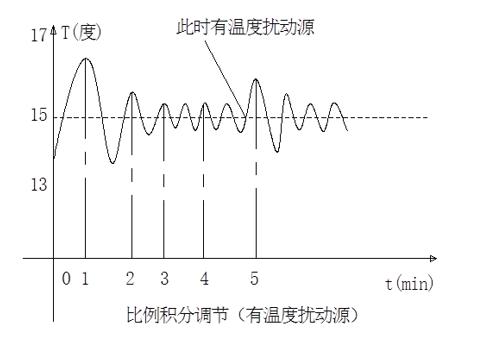
当存在温度扰动源时,加入微分项调节可以减小温度扰动源的影响。
带扰动源的PID控制温度图;
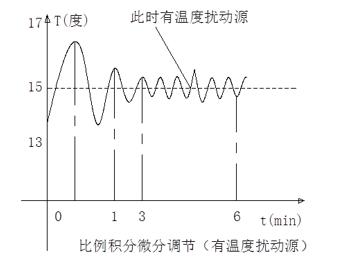
微分时间TD对系统性能的影响:增加微分时间TD也有利于加快系统响应,减少超调,增加稳定性,但系统抑制扰动的能力减弱。
PID控制参数设置方法:
工程应用中通常采用经验试凑法。
经验试错法是实践中最实用的方法。在设置参数时,我们必须仔细观察系统的响应,并根据系统的响应来决定调整那些参数。
设定步骤:先比例,再积分,再微分。
设定比例参数:先将P值放在一个小的位置,然后逐渐增大,观察被控量的变化曲线,使被控对象(温度)和驱动器(表冷器阀门)有相应的变化。
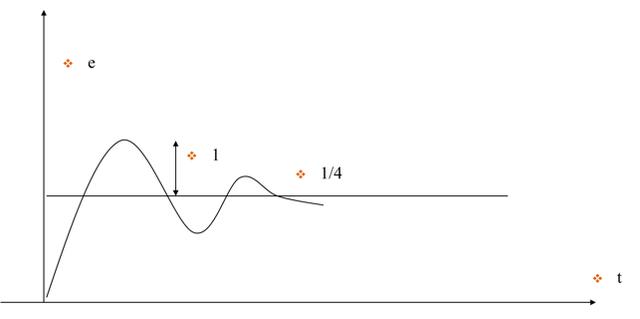
设置积分参数:设置好比例参数后,减小比例值(10 ~ 20%),然后由大到小逐渐增加积分时间T1,直到得到一个4: 1的衰减过程。
PID控制参数整定方法:
常见被控对象PID参数选择范围(经验值)
出现发散振荡时,应立即切换到手动。系统稳定后,通过减小放大倍数、增加积分时间或减少微分时间等措施可以降低PID效用,然后可以再次切换到自动控制。
PID控制汇总:
PID控制是闭环控制,PID控制是误差控制。
增大比例因子KP会加快系统的响应速度,但如果比例因子过大,系统会超调振荡,从而破坏稳定性。
增加积分时间TI有利于减小超调和振荡,使系统更加稳定,但系统的稳定过程较长。
增加微分时间TD也有利于加快系统的响应速度,减小超调量,增加稳定性,但系统抑制扰动的能力减弱,系统振荡次数增加。
p功能是最基本的控制功能。增加I功能后,可以实现无误差控制,提高控制精度。增加D功能可以全面提高控制品质。
公式:
找到最佳参数设置,从小到大检查。
先比例后积分,再加微分。
曲线频繁振荡,放大倍数要减小。
曲线在大湾周围浮动,放大倍数调大。
曲线偏差恢复缓慢,积分时间减少。
曲线波动周期长,积分时间更长。
曲线的振荡频率快。首先,降低差速器。
如果动态差异波动缓慢,则应延长微分时间。
两波理想曲线,前高后低,4比1。
一看二次调整和多次分析,调整质量不会低。
本文来源于网络。作者:杜南机电总部技术部,暖通南方社2017 . 3 . 8编辑。